在遥感影像建筑物变化检测研究中,非相关目标干扰和双时相特征交互不足等问题长期制约着检测精度的提升。为解决该技术难题,本文提出了一种基于深度学习的遥感影像建筑物变化检测方法。该方法的核心在于多尺度特征融合机制的构建,其结构由3 个关键部分组成:用于多层次特征获取的特征提取模块、负责特征差异分析的计算模块以及执行特征重建的上采样模块。首先,设计了一种兼顾计算效率和模型简洁度的特征提取方案,在保持特征表征能力的同时优化了计算资源的使用;其次,将时间维度特征交互与空间维度特征聚合相结合,形成时空特征协同机制,不仅降低了非相关目标的影响,还促进了双时相特征的深度整合;最后,设计一种渐进式多尺度差异特征掩膜上采样技术,提升变化区域的重建质量。为评估方法的性能,研究选取了大规模地球视觉图像变化识别建筑物变化检测数据集(LEVIR-CD)和武汉大学变化检测数据集(WHU-CD)两个公开基准数据集进行验证。结果表明,所提出的方法在LEVIR-CD 数据集的F1值达到了92.15%,在WHU-CD 数据集上达到了90.47%,均优于现有主流方法,有力证实了该方法的价值和实际应用前景。
在城乡空间构成中,建筑物扮演着不可或缺的角色,是人类生活环境中的核心要素。为了有效监测建筑物的动态变化,对其进行变化检测是重要手段之一。随着遥感技术的发展,影像数据在空间分辨率、光谱特征和时间维度等方面取得了显著进步,为地表覆盖变化的精确监测奠定了坚实基础[1-2]。从技术发展的脉络来看,传统变化检测方法包括基于像素和对象的分析方法[3-4]。前者虽然具有算法实现简便的优势,但其逐像素运算模式不仅计算效率低下,而且检测结果中常出现离散噪声点,制约了识别准确度的提高。相较九游体育科技而言,后者以影像分割后的对象为基本处理单元,能够充分挖掘影像的上下文信息,有效降低了由单一像素光谱变异导致的误判风险。但这种方法的检测效果与图像分割质量密切相关,当面对建筑物等具有复杂结构的场景时,其应用性能往往会受到一定制约。
随着人工智能技术的发展,深度学习在自动化数据处理领域取得了突破性进展,特别是在降低人工标注成本和提升学习效率方面表现出色[5-6]。在遥感变化检测领域,文献[7]提出了一种网络架构,该架构充分利用了时序影像间的关联特性,设计出具有权重共享机制的双分支网络模型。这种基于卷积神经网络的设计不仅确保了特征提取的有效性,还通过参数共享机制显著降低了计算复杂度,从而提高了模型训练效率。针对遥感影像中复杂背景等难题,文献[8]提出一种基于变换器(Transformer)技术的解决方法,该方法通过对时间序列影像执行语义分割操作,旨在生成差异特征图;文献[9]将视觉几何群16 层网络(visual geometry group 16,VGG16)深度网络组件整合进处理流程,显著提升了时序影像在细节特征提取中的能力。当前,在变化检测研究领域,研究者正面临若干亟待解决的关键问题,主要包括双时态特征提取过程复杂、特征交互受限以及非目标对象干扰等。为应对这些挑战,本文设计了一种基于类U型网络(U shape network,U-Net)框架的多尺度特征融合方法,重点解决建筑物变化检测问题,并为检测流程的各个环节提供解决方法。在特征提取环节,采用经过预训练的移动翻转瓶颈卷积(mobile inverted bottleneck convolution,MBConv)模块作为基础单元,该设计显著提升了特征提取效能并降低了计算成本。在差异特征提取方面,结合了分组卷积(group convolution,GConv)和通道混洗(channel shuffle,CS),通过时间注意力机制的引入,有效增强了真实差异特征的识别精度。为了更有效地削弱非目标元素的干扰,通过引入十字交叉注意力机制(criss-cross attention,CCA),从而保证了全局上下文信息的紧密连接。在特征提升阶段,通过构建特征掩码并与原始输入特征进行逐级融合,最终借助解码器完成分类,并输出检测结果[10]。为验证所提模型及各模块的有效性,本文设计并实施对比实验和消融实验,同时结合模型可视化技术进行了深入分析与讨论。

孪生式U 形网络(SiamUnet)特征在于采用双分支编码器-解码器结构,并实现了对称参数共享机制[11]。首先,利用特征提取模块提取初步特征;其次,通过下采样模块,特征逐渐由局部细节扩展至全局结构,实现了特征维度的提升;再次,这些分阶段获取的双时态特征被传递至解码器,以精确区分两者间的微小差异;最后,利用上采样模块将差异信息从微观层面整合至宏观层面,得到最终的变化检测结果[12-13]。
<九游体育科技img src=https://nimg.ws.126.net/?url=http%3A%2F%2Fdingyue.ws.126.net%2F2026%2F0408%2F656392bcj00td6bc20057d200tc010ag00tc010a.jpg&thumbnail=660x2147483647&quality=80&type=jpg />
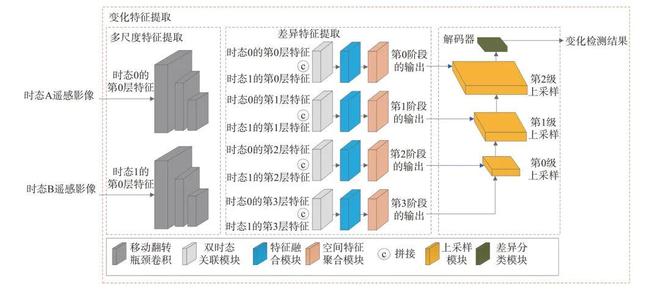
本文提出的变化检测算法包含了差异特征提取、模型训练及结果评价,技术路线 本文技术路线
SiamUnet 在编码阶段对复杂语义分割模型的过度应用,造成计算资源浪费,同时在解码阶段引入复杂差异特征提取模块,导致模型结构复杂化[14]。因此,本文对SiamUnet 架构进行重构,将其划分为双时态特征提取、差异特征分析及解码器三大核心模块。
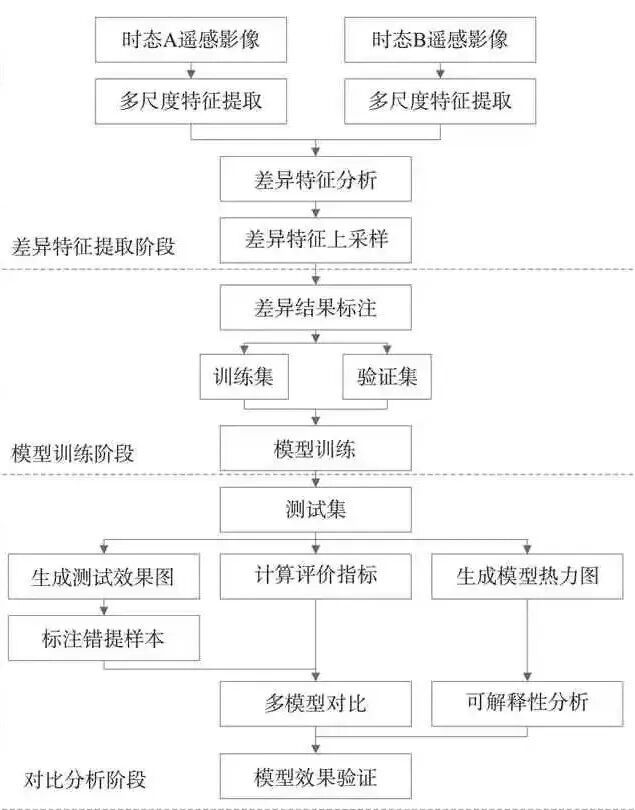
图2 直观地展示了该网络的运行步骤,首要操作是利用移动翻转瓶颈卷积技术,从双时态影像数据中提取多尺度特征信息。为了增强差异特征的辨识力,专门设计一个模块来加深双时态特征间的关联性,并融合了空间特征聚合(spatial fusion,SF)模块,以提升目标识别的精确度。在上采样阶段,根据最高维度特征,逐步融合各阶段的差异特征,实现了从全局到局部的多层次差异特征提取。
在深度学习领域,VGG16 和Transformer 等预训练模型因其出色的特征提取能力而得到广泛应用。这类模型通常采用增加网络层级和扩展通道数量的方式提升性能表现[15]。然而,研究揭示了网络架构设计中的一个关键现象:当网络在深度或宽度任一维度持续扩展时,其性能增益呈现边际递减效应,因此提出高效网络(EfficientNet)结构,该架构在模型复杂度与性能表现之间实现了优化平衡。
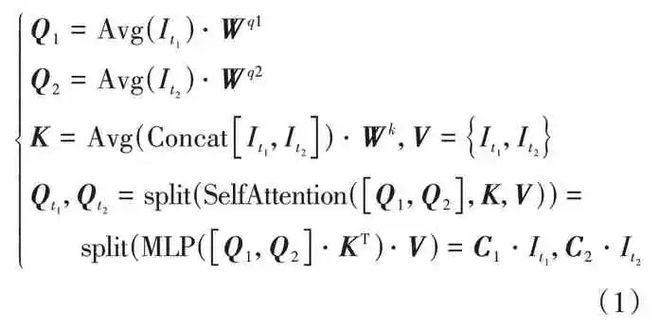
1)双时态语义差异引导。考虑变化检测任务与图像语义分割任务的差异,特别关注从不同时相影像中有效抽取差异目标的语义信息。为此,设计一种基于自注意力机制的双时态关联模块,该模块能够显著提高双时态影像在语义差异层面的交互能力,确保时间维度上的差异信息能够准确传递。在特征提取阶段,首先从原始数据中获取两个时态特征和,并将其整合至输入特征值V中。为构建关键特征表示,采用平均池化方法对和进行融合处理,所得结果与权重矩阵Wk进行矩阵运算,从而生成关键字K,同时,分别对和实施平均池化操作。其次通过权重矩阵和的线性变换,得到对应的查询向量Q1和Q2。为了提升特征的表达能力,引入基于多层感知器(multilayer perceptron,MLP)的自注意力机制评估通道间的相关性,并将这些相关性权重与输入特征的对应通道进行逐通道乘法运算。最后获得优化后的双时态特征和,计算公式为
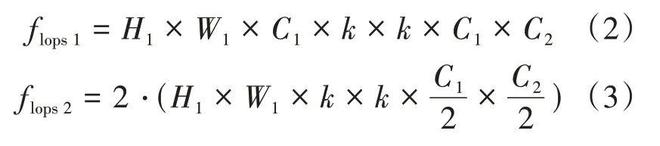
2)双时态特征融合。针对双时态特征在差异提取前的相互独立难题,本文提出了一种双时态特征融合模块,其核心在于实现特征的高效与精确整合,从而提升差异信息的提取能力。此模块融合了改良的分组卷积和混洗模块,尽管分组卷积通过分割通道提升了计算速度,但也可能导致特征间联系减弱。为解决这一问题,引入通道混洗策略,它在减少模型参数和计算量的同时,确保了特征的高质量表达。在实际操作中,首先根据时态信息对通道执行分组卷积,然后通过通道混洗对特征进行重组,以获得融合的特征。这两种卷积操作的计算公式为
式中,flops1 为分组卷积操作1;flops2 为分组卷积操作2;H1、W1分别为高度、宽度;C1为分组卷积操作1 通道数;C2为分组卷积操作2 通道数;k 为卷积核大小。通过对式(1)、式(2)对比分析可以发现,在相同输入输出条件下,传统卷积的计算量是分组卷积的两倍。本模块采用3层级联的分组卷积结构,并通过通道混洗实现特征连接,从而实现了特征的高效融合。
3)空间特征聚合。针对双时态特征中存在的冗余信息问题,建立高效的空间特征交互机制对提高目标检测精度尤为重要[16]。本文设计一种基于十字交叉注意力机制的特征融合方法,该机制依据距离度量准则,在水平和垂直方向构建十字形信息通道,实现了特征的高效整合。空间特征聚合模块由双层十字交叉注意力结构组成。与传统方法需要逐像素建立全局关联不同,本方法仅通过两次十字交叉操作即可为每个像素构建完整的空间关联网络,在保证计算效率的同时显著提升了特征融合效果。
在模型设计上,本文设计一个轻量级上采样模块,该模块接收特征数据后,首先,利用3×3 卷积将特征图尺寸扩大一倍,并进行批量归一化处理;其次,通过1×1 卷积的逐点操作,将通道数减半,对处理后的特征与差异特征掩码进行逐点相乘操作;最后,上采样后的特征被递送给分类器,以产生最终的检测结果。该设计在维持检测性能的同时,显著降低了参数数量和计算负荷。
本研究选取LEVIR-CD 和WHU-CD 两个公开数据集进行验证,以评估所提方法在建筑物变化检测中的性能,其中,LEVIR-CD 数据集包含637 组RGB 影像,空间分辨率为0.5 m,单幅影像尺寸为1 024×1 024像素。考虑计算效率,将原始影像裁剪为16 个256×256 像素的子图像。按照标准实验设置,将7 120 对子图像(占总样本70%)用于训练,1 024对(10%)用于验证,2 048对(20%)用于测试。
WHU-CD数据集包含一对高分辨率多光谱影像,涵盖红、绿、蓝三个波段,空间分辨率为0.2 m,影像尺寸为32 507×15 354 像素。原始影像被裁剪为512×512像素的子图像,共包含1 260对训练样本和690 对测试样本。此外,每幅512×512 像素图像被进一步划分为4 个无重叠的256×256 像素子区域。同时,随机从训练集中抽取了10%的样本构建验证集。经过上述处理,最终得到了一个包含4 536对训练样本、504对验证样本和2 760对测试样本的数据集。


在优化模型的过程中,本研究选用交叉熵损失函数(cross entropy,CE)作为评估指标,表示为[17]

式中,L()为交叉熵损失函数;G为实际变化区域;为模型预测区域;Gi为实际变化结果;̂为预测变化结果;N为预测像元数量。

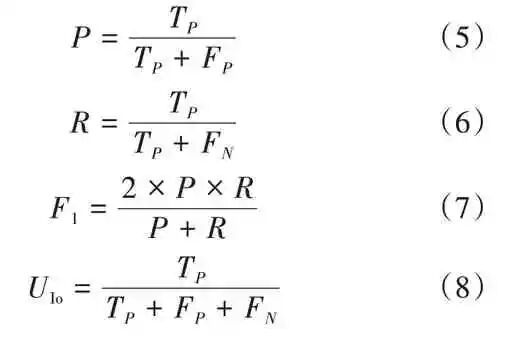
为全面评估模型性能,本文采用4 项核心指标:精确度P、召回率R、F1值和交并比(intersection over union,IoU)UIo。分别表示为[18]

式中,TP、FP分别为正确划分、错误划分的变化像素数量;FN为错误划分的未变化像素数量。

1)全卷积早期融合(fully convolutional early fusion,FC-EF)模型。该模型采用早期融合策略,将双时相影像融合后输入U-Net 的编码器-解码器结构进行处理。
根据表2 和表3 的量化结果,本文提出的方法在LEVIR-CD 数据集上展现了出色的性能,F1值和IoU 指标分别达到了91.15%和83.66%。与FC-EF、STANet、IFN 和BiT 模型进行对比分析,F1值分别取得了7.64%、3.78%、1.51%和0.89%的提升。在WHU-CD 数据集上,其F1值和IoU 分别达到了89.47%和81.88%,优于对比模型。实验结果表明,本文方法在2 个数据集上均取得了最优性能。IFN 模型虽具有较高的精确度,但其召回率偏低;STANet 模型的召回率虽略高,但精确度不足。相比之下,本文方法在精确度和召回率之间实现了更好的平衡,获得了最高的F1值。在对比模型中,基于Transformer 的BiT 模型表现较好,而FC-EF模型的整体性能相对较弱。
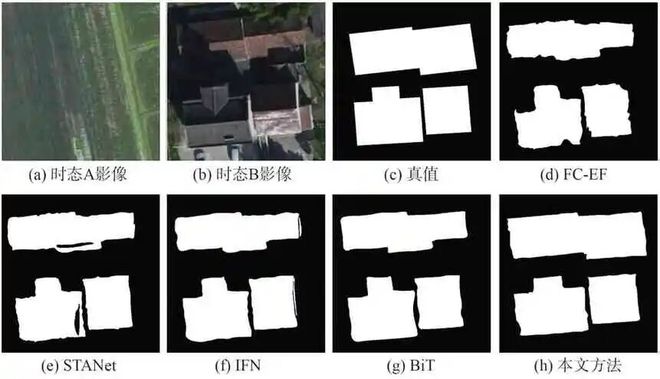
图3 为LEVIR-CD 数集的检测结果,图4 为WHU-CD 数据集的检测结果。分析图3 和图4 发现:在建筑物变化检测任务中,本文提出方法表现出色,检测结果与真实情况高度一致,能够精确绘制建筑物边界,显著降低误检和漏检率。

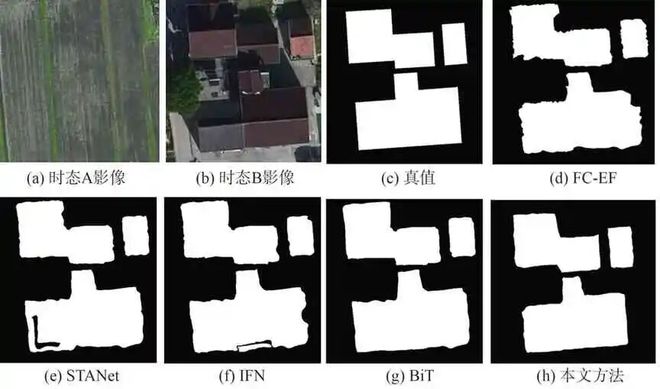
FC-EF 模型检测性能存在显著不足,易受伪变化因素的干扰,频繁引发误报和漏报。STANet和IFN 模型由于视野范围的限制,难以精确识别建筑物的细微变化特征。尽管BiT 模型在检测性能方面与本文方法相当,但其上采样过程中的特征图尺寸缩减导致了中低层细节信息的丢失。综上所述,本文提出的方法能够准确预测建筑物在不同尺寸的变化,成功解决了大尺寸建筑物检测中的碎片化与不完整性挑战。在检测精确度和轮廓细节的表达上,本文方法相较于其他对比方法表现出明显的优越性。
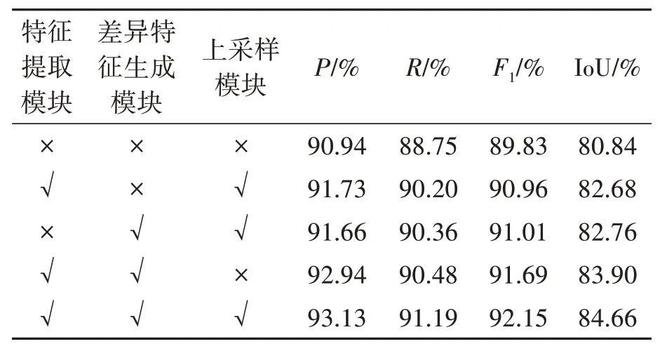
为系统评估特征提取模块、差异特征生成模块、上采样模块对网络性能的影响机制,基于LEVIR-CD 数据集,设计5 组对照实验,实验设计中,“×”标记表示禁用相应模块,“√”标记则表示启用该模块。同时,为建立可靠的性能参照系,本文构建了一个未包含上述3 个模块的基础网络(SiamUnet),实验结果如表4 所示。

实验数据表明,特征提取模块、差异特征生成模块、上采样模块的引入均显著提升了SiamUnet 的性能。当任意模块被移除时,模型的检测精度均出现不同程度的下降。需要注意的是,由于SiamUnet未包含上述3个模块,其精度指标明显低于其他实验组,该结果有力证实了这些模块对模型性能提升的重要贡献。
深入分析消融实验结果发现,差异特征生成模块的缺失对模型性能影响最为显著,导致F1值和IoU 值分别下降1.19%和1.98%。这一现象凸显了差异特征生成模块在模型中的核心作用,其通过促进双时态影像间真实差异部分的提取,显著提升了不同尺度建筑物的变化检测精度。特征提取模块的移除则使F1值和IoU 值分别降低1.14%和1.90%,其影响程度仅次于差异特征生成模块,表明特征提取模块通过预训练的移动翻转瓶颈卷积模块,对变化检测效果的优化具有重要作用。上采样模块的移除导致F1值和IoU值分别下降0.46%和0.76%,虽然影响相对较小,但仍证实了该模块在提升特征提取效果的价值。实验结果表明,3 个模块在提升建筑物变化检测性能方面均发挥着重要作用,为后续网络优化提供了重要的理论依据和实践指导。
针对深度学习在遥感影像建筑物变化检测任务中存在的复杂难题,本文提出一种变化检测模型。为验证模型性能,研究选取了两个公开的遥感数据集进行系统性实验评估。实验结果表明,相较于现有模型,本文方法在建筑物变化区域的识别精度和定位准确性方面均取得了显著突破,尤其在应对复杂多变的实际场景以及处理多尺度建筑物变化检测任务时表现出优异的性能。通过消融实验的定量分析,进一步验证了模型各功能模块的有效性。基于当前研究成果,后续研究将着重探索更优化的模型结构设计,以持续提升模型的实际应用价值和技术潜力。
特别声明:以上内容(如有图片或视频亦包括在内)为自媒体平台“网易号”用户上传并发布,本平台仅提供信息存储服务。
紧急情况!上海虹桥、浦东机场,接连有旅客被拦截!警察一句话,小伙当场吓懵:这一去,就回不来了
“祖先给的特权”,河南网友称祖坟在景区祭祖免票,景区回应:没过检票口,一般是附近住户的祖坟
杭州男孩写作业太拖拉,被亲妈送到派出所,结果一天都写不完的作文,在派出所一小时就完成
塔克36+15+12大号三双!广厦险胜山东 高诗岩22+5胡金秋13分
女租户疑因被扣押金 退房后用水泥堵住7个下水管 房东:衣柜上方、床下还有腐肉
苹果折叠屏或命名iPhone Ultra,屏幕由三星独供,仍计划九月发布