本发明属于仓储转运领域,公开了一种密集仓储立库的四向穿梭车精准极速停靠方法,采用匀减速的减速方式替代匀速的爬行方式,能够明显降低仓储位四向车减速时产生的加速度,并提高预定转运速度的设置标准,从而不仅能避免仓储位四向车承载物的滑移乃至滑落,而且也使得仓储位四向车的转运移动效率明显提高,首先,基于仓储位四向车的实际承载质量、预定转运速度以及预定减速距离得到初始减速度集和减减速度集,接着,在初始减速度集、减减速度集内分别选定四向车初始减速度、四向车减减速度,然后,基于预定转运速度、四向车初始减速度以及
1.密集仓储立库的四向穿梭车精准极速停靠方法,仓储位的数量为多个且呈直线依次
设置形成仓储位列,仓储位设有示教传感器,仓储位四向车通过预定转运速度在仓储位之
间移动至所述示教传感器之前预定减速距离的减速位置,并继续减速移动至所述示教传感
器并触发该示教传感器,该示教传感器通过发出制停信号制停仓储位四向车,所述密集仓
储立库的四向穿梭车精准极速停靠方法用于使所述仓储位四向车移动所述预定减速距离,
步骤S1:基于所述仓储位四向车的实际承载质量、所述预定转运速度以及所述预定减
速距离得到该仓储位四向车在所述减速位置的即时减速度选择集、及匀减速的减减速度选
步骤S2:在所述初始减速度集、所述减减速度集内分别选定四向车初始减速度、四向车
步骤S3:基于所述预定转运速度、所述四向车初始减速度以及所述四向车减减速度建
2.根据权利要求1所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
其中,所述仓储位四向车在所述仓储位列中的起始仓储位和目标仓储位之间移动,将
所述起始仓储位和所述目标仓储位之间的距离作为转运总距离,所述预定减速距离与所述
3.根据权利要求1所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
ρ为匀减速的减减速度,a为所述仓储位四向车的所述减速位置的即时减速度,V为所
述预定转运速度,S为所述预定减速距离,a为保持所述仓储位四向车承载物品相对所述仓
4.根据权利要求1所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
其中,在步骤S4中,通过所述极速停靠模型得到所述极速减速距离,当该极速减速距离
与所述预定减速距离不相等,且所述制停信号制停仓储位四向车时,所述仓储位四向车中
5.根据权利要求4所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
其中,所述预定减速距离包括一个所述极速减速距离或者多个连续循环的所述极速减
6.根据权利要求5所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
其中,所述极速减速距离的循环次数具有预定上限,当循环次数等于预定上限且所述
7.根据权利要求1所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
ρ为匀减速的减减速度,a为所述仓储位四向车的所述减速位置的即时减速度,V为所
8.根据权利要求1所述的密集仓储立库的四向穿梭车精准极速停靠方法,其特征在于:
其中,所述仓储位列为多个,所述多个仓储位列具有两个相互正交的延伸方向,所述多
[0001]本发明属于属于仓储转运领域,具体涉及一种密集仓储立库的四向穿梭车精准极
[0002]高密度立体仓储是现代物流仓储的未来支点。而作为当前工业物流仓储领域的核
心转运移动装置,仓储位四向车具有无线通信、精确认址,以及自动转运移动等特点,这使
[0003]目前,承载有物品的仓储位四向车的停靠方式主要有两种:直接停靠与爬行停靠。
直接停靠是四向车通过伺服电机的位置模式自预定减速阶段由预定转运速度直接减速到
0,并刚好到达目标位置,详见图1,因此也叫零速停靠;爬行停靠是在目标仓储位预设示教
传感器,四向车通过在距离目标仓储位预定减速距离时,通过减速至远小于预定转运速度
的爬行速度,并以该爬行速度移动至示教传感器,触发示教传感器发出制停信号,使得仓储
位四向车从爬行速度减速到零制停,详见图2,相比于直接停靠,爬行停靠减少了停靠时仓
储位四向车的速度变化量,避免了仓储位四向车在停靠时因惯性作用超出目标仓储位所在
[0004]但是,爬行停靠也存在着如此不足,由于爬行停靠远小于预定转运速度,因此,在
仓储位四向车减速时,也会因较短时间内较大速度变化量产生的较大加速度,导致仓储位
四向车的承载物相对仓储位四向车产生滑移乃至滑落;抑或为了保证速度变化不引发承载
物的滑移乃至滑落,预定转运速度只能选定在预定范围内,从而延长了仓储位四向车的移
[0005]针对现有技术的不足,本发明提供密集仓储立库的四向穿梭车精准极速停靠方
法,采用匀减速的减速方式替代匀速的爬行方式,能够明显降低仓储位四向车减速时产生
的加速度,并提高预定转运速度的设置标准,从而不仅能避免仓储位四向车承载物的滑移
[0007]密集仓储立库的四向穿梭车精准极速停靠方法,仓储位的数量为多个且呈直线依
次设置形成仓储位列,仓储位设有示教传感器,仓储位四向车通过预定转运速度在仓储位
之间移动至示教传感器之前预定减速距离的减速位置,并继续减速移动至示教传感器并触
发示教传感器,示教传感器通过发出制停信号制停仓储位四向车,密集仓储立库的四向穿
梭车精准极速停靠方法用于使仓储位四向车移动预定减速距离,其特征在于,包括以下步
[0008]步骤S1:基于仓储位四向车的实际承载质量、预定转运速度以及预定减速距离得
到仓储位四向车在减速位置的即时减速度选择集、及匀减速的减减速度选择集,作为初始
[0009]步骤S2:在初始减速度集、减减速度集内分别选定四向车初始减速度、四向车减减
[0010]步骤S3:基于预定转运速度、四向车初始减速度以及四向车减减速度建立极速停
[0012]优选地,仓储位四向车在仓储位列中的起始仓储位和目标仓储位之间移动,将起
始仓储位和目标仓储位之间的距离作为转运总距离,预定减速距离与转运总距离呈预定比
[0015]ρ为匀减速的减减速度,a为仓储位四向车的减速位置的即时减速度,V为预定转
运速度,S为预定减速距离,a为保持仓储位四向车承载物品相对仓储位四向车不移动的临
[0016]优选地,在步骤S4中,通过极速停靠模型得到极速减速距离,当极速减速距离与预
定减速距离不相等,且制停信号制停仓储位四向车时,仓储位四向车中断移动并停止。
[0017]进一步地,预定减速距离包括一个极速减速距离或者多个连续循环的极速减速距
[0018]再进一步地,极速减速距离的循环次数具有预定上限,当循环次数等于预定上限
[0021]ρ为匀减速的减减速度,a为仓储位四向车的减速位置的即时减速度,V为预定转
[0022]优选地,仓储位列为多个,多个仓储位列具有两个相互正交的延伸方向,多个仓储
[0024]1.因为本发明的密集仓储立库的四向穿梭车精准极速停靠方法,首先,基于仓储
位四向车的实际承载质量、预定转运速度以及预定减速距离得到初始减速度集和减减速度
集,接着,在初始减速度集、减减速度集内分别选定四向车初始减速度、四向车减减速度,然
后,基于预定转运速度、四向车初始减速度以及四向车减减速度建立极速停靠模型,最后,
基于极速停靠模型使仓储位四向车移动预定减速距离,因此,本发明采用匀减速的减速方
式替代匀速的爬行方式,能够明显降低仓储位四向车减速时产生的加速度,并提高预定转
运速度的设置标准,从而不仅能避免仓储位四向车承载物的滑移乃至滑落,而且也使得仓
[0025]2.因为本发明的预定减速距离与转运总距离呈预定比例,因此,本发明通过设置
转运总距离与呈比例的预定减速距离,从而使得仓储位四向车在进行较长距离的物品转运
时,能够设置更高地预定转运速度,从而进一步地提高了仓储位四向车的转运移动效率。
[0026]图1为直接停靠方式的仓储位四向车的速度曲线为爬行停靠方式的仓储位四向车的速度曲线为本发明的实施例的仓储位列的示意图;
[0030]图5为本发明的实施例的密集仓储立库的四向穿梭车精准极速停靠方法的步骤示
[0031]图6为本发明的实施例的初始点速度为预定转运速度的速度曲线为本发明的实施例的初始点速度不为预定转运速度的速度曲线以及趋向于无穷大时的速度曲线时的极速减速距离的曲线的极速减速距离的曲线图。
[0036]为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实
施例结合附图对本发明的密集仓储立库的四向穿梭车精准极速停靠方法作具体阐述,需要
说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
[0037]如图3所示,本实施例中的仓储位的数量为多个且呈直线依次九游体育科技设置形成仓储位列,
仓储位设有示教传感器,仓储位四向车通过预定转运速度在仓储位之间移动至示教传感器
之前预定减速距离的减速位置,并继续减速移动至示教传感器并触发示教传感器,示教传
感器通过发出制停信号制停仓储位四向车,密集仓储立库的四向穿梭车精准极速停靠方法
用于使仓储位四向车移动预定减速距离,具体地,在仓储位四向车指向物品转运作业时,仓
储位四向车在仓储位列中的起始仓储位和目标仓储位之间移动,即从起始仓储位启动并加
速至预定转运速度,移动至减速位置时,仓储位四向车进行减速移动,当仓储位四向车减速
移动至示教传感器时,触发示教传感器,示教传感器向仓储位四向车发出制停信号,使得仓
储位四向车立即降速至0,从而停止在目标仓储位,将起始仓储位和目标仓储位之间的距离
作为转运总距离,预定减速距离与转运总距离呈预定比例,在本实施例中,预定减速距离/
转运总距离=20%‑30%,仓储位四向车可根据实际需求在接收到制动信号滞后制停。
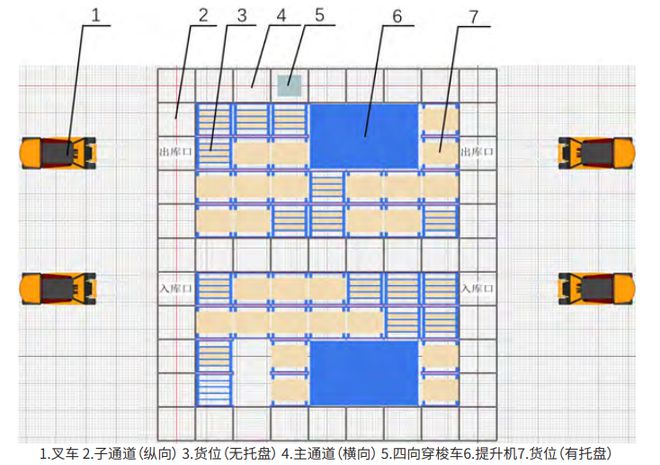
[0038]如图4所示,仓储位列为多个,多个仓储位列具有两个相互正交的延伸方向,多个
仓储位列共同形成水平矩阵的仓储网络,在本实施例中,仓储位四向车在水平面可进行正
[0039]如图5所示,密集仓储立库的四向穿梭车精准极速停靠方法S100包括以下步骤:
[0040]步骤S1:基于仓储位四向车的实际承载质量、预定转运速度以及预定减速距离得
到仓储位四向车在减速位置的即时减速度选择集、及匀减速的减减速度选择集,作为初始
[0043]ρ为匀减速的减减速度,a为仓储位四向车的减速位置的即时减速度,V为预定转
运速度,S为预定减速距离,a为保持仓储位四向车承载物品相对仓储位四向车不移动的临
[0044]步骤S2:在初始减速度集、减减速度集内分别选定四向车初始减速度、四向车减减
速度,具体地,初始减速度、四向车减减速度均选择初始减速度集、减减速度集中的较大值。
[0045]步骤S3:基于预定转运速度、四向车初始减速度以及四向车减减速度建立极速停
[0048]ρ为匀减速的减减速度,a为仓储位四向车的减速位置的即时减速度,V为预定转
[0050]当极速减速距离与预定减速距离不相等,且制停信号制停仓储位四向车时,仓储
位四向车中断移动并停止,预定减速距离包括一个极速减速距离或者多个连续循环的极速
减速距离,并且极速减速距离的循环次数具有预定上限,当循环次数等于预定上限且仓储
位四向车未接收到制停信号时,仓储位四向车制停报警,具体地,当仓储位四向车移动一个
极速减速距离后,若未收到示教传感器发出的制停信号,则以当前速度为初始速度循环移
[0051]以下结合实施例对极速停靠模型、初始减速度集以及减减速度集的建立进行具体
[0052]以下说明均以如下反应即时点的加速度a、速度V、减减速度‑ρ、预定转运速度V以
[0057]一者,如图6所示,开始减速停靠的初始速度为预定转运速度V,对应仓储位四向
车在减速位置开始减速,以下等式为在仓储位四向车第一次移动极速减速距离的结束点,
[0061]其中,t为曲线的末梢点位置的即时时间点,a为曲线的末梢点位置的即时加速
度,V为曲线的末梢点位置的即时速度,且为了保证仓储位四向车转运物品不受惯性影响
而相对移动,0<V<V<<V,V为急停至0时,不使得物品因惯性而移动的速度,即现有技
术中的爬行速度,从而V相对V极小,因此V可忽略;并且以V的仓储位四向车急停至0时产
生的位移极小,因此该位移也可忽略不计,从而基于式(1.1)、(1.2)以及(1.3)得到以下:
[0064]再者,如图7所示,开始减速停靠的初始速度不为预定转运速度V,对应仓储位四
向车第一次移动极速减速距离结束时未接收到制停信号而再次基于极速停靠模型开始移
动,以下等式为仓储位四向车第一次移动极速减速距离的结束点,即t对应的曲线]以下等式为仓储位四向车未接收到制停信号而再次基于极速停靠模型开始移动
的终点,即曲线]其中,t为曲线的末梢点位置的即时时间点,S、S分别为仓储位四向车的两个相
[0076]其中,V已知,为了保证物品不受惯性影响,仓储位四向车在减速过程中的起始加
[0077]第一种情况时,S仅与ρ相关;第二种情况时,S仅与ρ、a相关,易得,当a的绝对值
[0078]第一种情况是,S关于ρ单调递减;第二种情况时,S为1/ρ的一元二次函数,且ρ=
[0109]上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围,本领域普
通技术人员在所附权利要求范围内不需要创造性劳动就能做出的各种变形或修改仍属本
3、成为VIP后,您将拥有八大权益,权益包括:VIP文档下载权益、阅读免打扰、文档格式转换、高级专利检索、专属身份标志、高级客服、多端互通、版权登记。
4、VIP文档为合作方或网友上传,每下载1次, 网站将根据用户上传文档的质量评分、类型等,对文档贡献者给予高额补贴、流量扶持。如果你也想贡献VIP文档。上传文档
一种高银负载量的花状结构Ag@ZnO增强相粉体的稳定可控制备方法.pdf
2025年上海市“尖峰装置”在农业大棚智能温控领域的创新实践.docx
2025年天津市城乡改造中老旧厂区文创产业园区改造可行性研究报告.docx
玩家国度ROG Zephyrus M16 (2022) 笔记本电脑 GU603ZX ZW ZM ZE 繁体中文版使用手册.pdf
概率论导论(翻译版)Joseph K. Blitzstein习题解答.pdf
原创力文档创建于2008年,本站为文档C2C交易模式,即用户上传的文档直接分享给其他用户(可下载、阅读),本站只是中间服务平台,本站所有文档下载所得的收益归上传人所有。原创力文档是网络服务平台方,若您的权利被侵害,请发链接和相关诉求至 电线) ,上传者